Bionski čistilec foto napetostnih in solarnih panelov
Predmet izuma
Predmet izuma je s področja solarne tehnike, čiščenja solarnih in foto-napetostnih panelov. Bionski čistilec foto-napetostnih in solarnih sistemov je avtonomen in delno energetsko neodvisen. Ta naprava deluje avtonomno, kar pomeni, da je zasnovana tako, da je neodvisna od priključitve na oddaljene napajalne in krmilne naprave. Hkrati je delno energetsko neodvisna, saj ima integriran lasten sistem za polnjenje akumulatorjev iz obnovljivih virov energije. Način premikanja in oprijem je zasnovan na anatomiji kuščarja. Izum je enkraten primer iskanja tehničnih rešitev z zgledom po naravi in hkrati nudi nove poglede na okolje.
Prikaz problema
Pri čiščenju foto-napetostnih in solarnih panelov je problem v obstoječih čistilnih sistemih, da niso avtonomni in so hkrati energetsko potratni. Avtonomije ne zagotavljajo, saj so povezani na vir energije (običajno električni ali stisnjen zrak).
Tehnični problem, ki ga rešuje izum, je avtonomno čiščenje foto-napetostnih in solarnih panelov na objektih, ki so težje dostopni. Omogoča čiščenje panelov do naklona cca. 100 % oz. kota 45°. Panelov s takšnim naklonom ne moremo čistiti z roboti, ki za premikanje uporabljajo kolesa ali gosenice, saj pride do zdrsa. Pri našem izumu ne pride do zdrsa, saj uporabljamo vakuumske priseske. Avtonomijo dosežemo z nameščenimi akumulatorji, ki napajajo čistilec. Hkrati pa izum ponuja rešitev delne samooskrbe z energijo, saj je nameščen fotovoltaični panel, ki polni akumulatorje avtonomne naprave. Izum prikazuje primer iskanja tehnične rešitve z zgledom po naravi. Podobne rešitve srečamo v določenih tehničnih aplikacijah, kot je gibanje robotov v vesolju, za rešitev čiščenja solarnih in foto-napetostnih panelov pa je to nov pristop.
Podatki o stanju tehnike, dosedanje znane rešitve in njihove pomanjkljivosti
Na tržišču imamo nekaj do sedaj znanih rešitev. Ena rešitev je umivanje panelov z vodo pod tlakom. Za takšno rešitev je potrebno imeti tehnično opremo, ki je draga. Običajno se za čiščenje večjih sistemov po tem postopku uporabljajo rešitve z gasilsko opremo. Takšna rešitev je težje dostopna in hkrati potrebuje večje število človeških virov.
Druga podobna rešitev je umivanje panelov z gobo. To rešitev običajno izvedemo ročno. V tem primeru obstaja velika nevarnost zdrsa in poškodbe. Hkrati je velika verjetnost poškodovanja panelov, saj običajno nimamo dovolj servisnih poti med paneli, zato je potrebno hoditi po panelih.
Naslednja rešitev na tržišču je sistem z rotirajočimi ščetkami. Pri tej rešitvi je slabost v tem, da je to naprava, ki je relativno groba in lahko pusti sledi na površini panelov. S poškodovanjem površine se poslabša izkoristek in posledično izgubimo pri proizvodnji energije. Pri tem sistemu še lahko ostanejo na panelih ščetine, ki povzročajo sence in prav tako zmanjšajo izkoristek proizvodnih sistemov.
Na trgu najdemo tudi veliko čistilcev oken, ki pa v večini uporabljajo magnetni sistem oprijema. Magnetni oprijem je možen zaradi dostopnosti do obeh strani stekla. Takšen sistem čiščenja ne pride v poštev za čiščenje foto-napetostnih in solarnih panelov. V primerih, kjer pa je uporabljen vakuumski sistem oprijema, potrebujejo za krmiljenje aktuatorjev dodatne napajalne in krmilne naprave.
Pri prvi rešitvi je bistvena slabost potreba po obsežni tehnični opremi in človeških virih. Pri naši rešitvi je ob izumu potreben le en človek, ki skrbi, da po očiščenju panela prestavi čistilca na drugi panel. Hkrati je cena izuma zanemarljiva glede na obstoječo rešitev.
Pri drugi predstavljeni rešitvi je nevarnost zdrsa, kar pa pri uporabi našega izuma odpade, saj avtonomno opravlja funkcijo čiščenja.
Pred rešitvijo čiščenja panelov z rotirajočimi ščetkami ima prav tako ima naš izum prednost, saj je avtonomen in neprimerno lažji. Iz tega razloga ne pride pri čiščenju do poškodbe površine panelov in je naš predstavljen izum trajnejša rešitev.
Magnetni principi čiščenja stekla niso uporabni za čiščenje panelov, saj nimamo na razpolago panelov, ki so na obeh straneh gladki in debeline panelov presegajo dimenzije stekla. Naš izum ni odvisen od debeline, saj na nasprotno stran panela ne rabimo nameščati dodatnih komponent, ker uporabljamo drugi princip oprijemanja (vakuumski priseski).
Naša rešitev ponuja enostavno namestitev naprave in enostaven princip gibanja te naprave po steklenih površinah.
Za gibanje bionskega čistilca panelov uporabimo sistem, ki je ponazorjen z gibanjem kuščarja, podvrste gekon. Gekon uporablja za oprijem posebne čepke na prstkih noge, ki ustvarijo silo lepljenja. Takšen oprijem omogoča nežno pritrditev naprave na stekleno površino.
Bistvena prednost naše naprave je ob avtonomnosti in delni samooskrbi še masa, ki je lahko relativno majhna in posledično ni nevarnosti za mehanske poškodbe sistemov, ki jih čistimo.
Poleg naštetih prednosti je ta izum poseben, saj takšen princip čiščenja temelji na naprednih pristopih reševanja problemov, ki delujejo na osnovi zgledov iz narave.
Našo rešitev bomo predstavili v nadaljevanju s skicami in opisom.
Opis nove rešitve
V današnjem tehnološkem napredku se je pojavil zelo močan trend iskanja rešitev tehničnih problemov, ki se zgleduje po podobnih rešitvah iz narave. V tem kontekstu predstavlja predstavljen izum tovrstno iznajdbo, ki jo lahko uvrstimo na področje bionike.
Bionski čistilec foto-napetostnih in solarnih panelov se uporablja za čiščenje panelov tako, da se namesti na panel z zgornje strani. Na sliki 1 je prikazan čistilec 2, ki se namesti na panel 1. Uporablja se lahko za čiščenje panelov do naklona cca. 100 % oz. kota 45°.
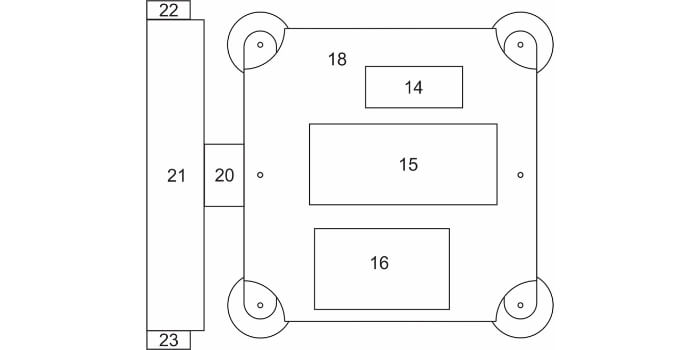
Slika 1 prikazuje sestavo bionskega čistilca foto-napetostnih in solarnih panelov. Sestavljen je iz nosilnega ohišja 18, oprijemal 3, 4, 5, 6, nosilca oprijemal 7, 8, distančnika nosilca oprijemal 9, 10, pomičnega mehanizma 13, servo elektromotorja 14, akumulatorja 15 in elektronike 16. Na vrhu je lahko nameščen lastni fotovoltaični panel (PV panel), ki nam služi za delno samooskrbo, saj polni akumulatorje. Oprijemala 3, 4, 5, 6 so privijačena na nosilec oprijemal 7, 8 z vijakom 17, ki je fiksno privit v oprijemalo in je v gibljivi zvezi z nosilcem oprijemal 7, 8. Nosilec oprijemal 7, 8 je povezan z nosilnim ohišjem 18 z osjo 11, 12. Med njima je distančnik nosilca oprijemala 9, 10, ki služi za prilagoditev višin posameznih komponent.
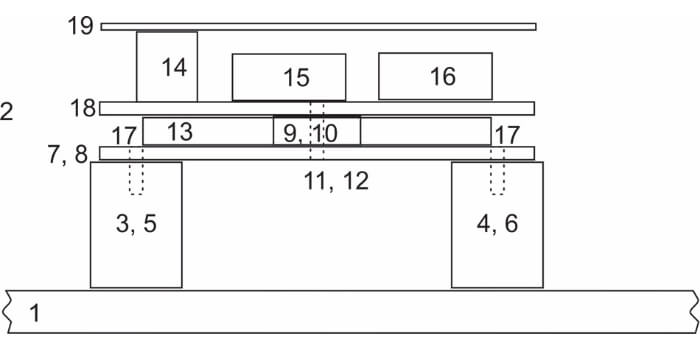
Slika 1: Bionski čistilec foto-napetostnih in solarnih panelov na podlagi (PV panelu)
Slika 2 podrobneje prikazuje sestavo čistilca pri pogledu s spodnje strani. Bistveni sestavni del je pomični mehanizem 13, ki nam preko sistema vodil mehansko povezuje pogonski servo elektromotor 14 z nosilci oprijemal 7, 8. Na sprednji strani se nahaja nosilec čistilnega sistema 20 in na njega nameščen čistilni sistem 21.
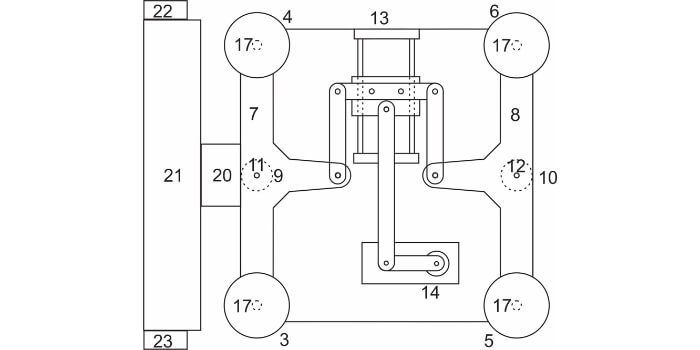
Slika 2: Sestava bionskega čistilca foto-napetostnih in solarnih panelov s spodnje strani
Za delno energijsko samooskrbo se lahko uporabi foto-napetostni panel 19, ki se namesti na sam čistilec. Nameščen PV panel nam poveča avtonomijo in s tem uporabno vrednost (slika 3).
Slika 3: Sestava bionskega čistilca foto-napetostnih in solarnih panelov z nameščenim PV panelom
Za pomik bionskega čistilca panelov se uporabi vakuumski sistem oprijema 3, 4, 5, 6, ki je ponazorjen z oprijemom kuščarja 37, podvrste gekon (slika 4). Gekon uporablja za oprijem posebne čepke na prstkih noge, ki ustvarijo silo lepljenja. Takšen oprijem omogoča nežno pritrditev naprave na stekleno površino. Kot generator vakuuma se lahko uporabi električni ali pnevmatični aktuator 3, 4, 5, 6. Mehanski del premikanja bionskega čistilca je zasnovan na principu hoje štirinožnih živali. Tukaj se navaja primer hoje kuščarja 37 (slika 4), ki ima vretenčasto obliko hrbta.
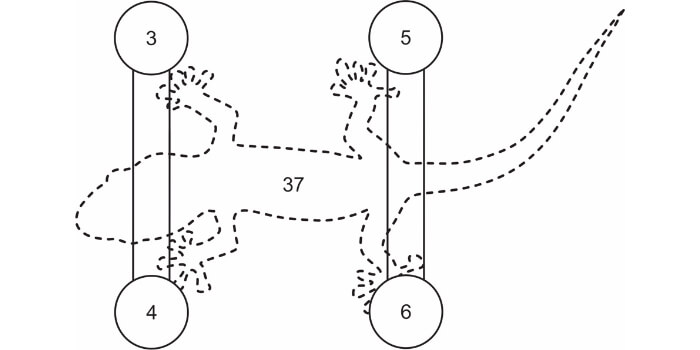
Slika 4: Gekon in analogija pomičnega mehanizma bionskega čistilca foto-napetostnih in solarnih panelov
Slika 5 podrobneje prikazuje sestavo pomičnega mehanizma 13. Osnovni element, ki ustvarja pomike pomičnega sistema je servo elektromotor 14. Servo elektromotor ima na gred nameščeno ročico 27, ki se lahko zasuče v levo ali desno za kot do 90°. Slika 3 nam prikazuje možen zasuk ročice 27 servo elektromotorja 14 za določen kot 28. Na osnovi zasuka ročice 27 se zgodi pomik povezovalne ročice 26 v eno ali drugo smer. Povezovalna ročica 26 je na eni strani spojena z vrtljivo zvezo z ročico servo elektromotorja 17, na drugi strani pa je spojena z vrtljivo zvezo z gibljivimi nosilnimi sanmi 32. Gibljive nosilne sani potujejo po dveh okroglih vodilih 33, 34. Okrogli vodili sta togo umeščeni v nosilec okroglih vodil 35, 36, ki je togo spojen z nosilnim ohišjem 18. Na gibljive nosilne sani je togo nameščena prečna ročica 29, ki služi za pritrditev vmesnih povezovalnih ročic 25, 30. Vmesni povezovalni ročici 25, 30 sta na eni strani spojeni z vrtljivo zvezo s prečno ročico 29 in na drugi strani s prav tako vrtljivo zvezo 24, 31 z nosilcem oprijemal 7, 8. Nosilca oprijemal 7, 8 sta z nosilnim ohišjem 18 povezana z vrtljivo zvezo 11, 12, ki predstavlja vrtišče posameznega nosilca oprijemal 7, 8.
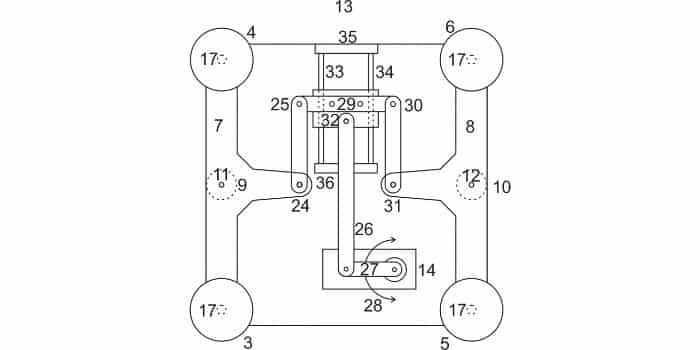
Slika 5: Sestava bionskega čistilca foto-napetostnih in solarnih panelov s spodnje strani s podrobnejšo predstavitvijo pogonskega mehanizma
Slika 6 prikazuje premikanje čistilca. Premikanje se izvede tako, da se pritrdita najprej priseska 3 in 6, medtem ko servo elektromotor 14 s pomičnim mehanizmom 13 poskrbi za premik priseskov 4 in 5 (na sliki 4 premik naprej 44). Ta del premikanja se izvede do zasuka 28 servo elektromotorja 14. Meja kota zasuka je odvisna od mehanske sestave, predvsem pa od dolžine ročice servo elektromotorja 27 in se določi programsko v krmilni enoti v mikrokrmilniku. Ko pridemo do meje zasuka, se gred servo elektromotorja 14 ustavi in ročica 27 za kratek čas miruje, da lahko vklopimo še druga dva priseska 4, 5, ki sta sedaj v prednjem položaju na posameznem nosilcu oprijemal 7, 8. Predno pričnemo izklapljati zadnja dva priseska na posameznem nosilcu oprijemal 7, 8, moramo že imeti vklopljena prednja dva, saj v nasprotnem primeru čistilec na poševni površini zdrsne. Sledi pomik gredi servo elektromotorja 14, torej ročice 27 v drugo smer 28, do meje zasuka. Slika 5 prikazuje drugi skrajni položaj gibanja. V koraku, ko prehajamo iz položaja iz slike 4 na položaj, ki je prikazan na sliki 5, imamo prisesana oz. aktivna priseska 4 in 5, medtem ko sta priseska 3 in 6 neaktivna. Med premikanjem gredi servo elektromotorja 14 in pomičnega mehanizma 13 se premika čistilec na sliki 5 v levo 44.
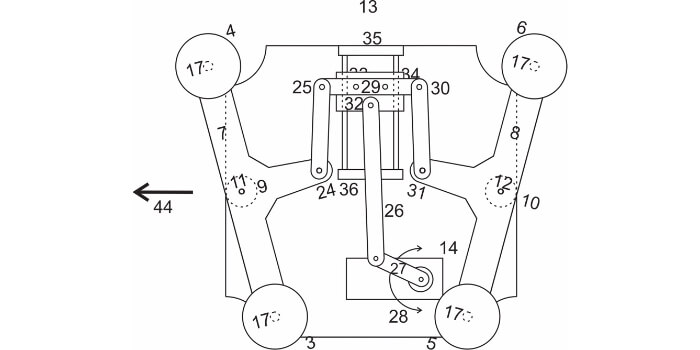
Slika 6: Sestava bionskega čistilca foto-napetostnih in solarnih panelov s spodnje strani pri pomiku prvega levega priseska naprej ter desnega nazaj in hkrati zadnjega desnega priseska naprej ter levega nazaj
Mehanski pomični mehanizem 13 poskrbi tudi za spreminjanje smeri gibanja čistilca in sicer tako, da se pred premikanjem mehanskega sistema pritrdita priseska 3 in 4, medtem ko priseska 5 in 6 nista pritrjena (prisesana). V tem primeru se ob premiku pomičnega mehanizma 13 s servo elektromotorjem 14 premakne zadnji del v desno stran in se čistilec obrne v levo.
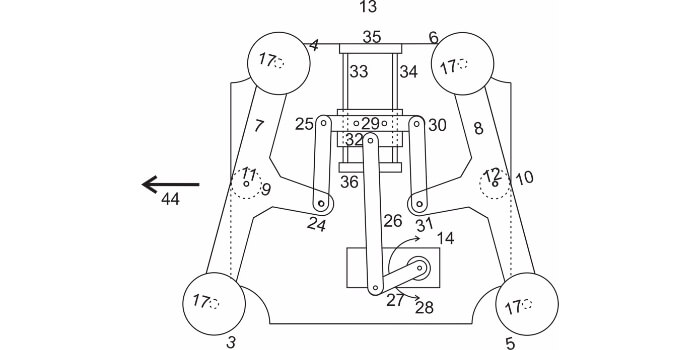
Slika 7: Sestava bionskega čistilca foto-napetostnih in solarnih panelov s spodnje strani pri pomiku prvega desnega priseska naprej ter levega nazaj in hkrati zadnjega levega priseska naprej ter desnega nazaj
Hitrost pomikanja je odvisna od hitrosti servo elektromotorja 14 in od postavitve ročic mehanskega sklopa 13. Če so ročice 25, 29, 30, 26 v začetnem položaju (ko sta levo in desno prijemalo na posameznem nosilcu prijemal v isti ravnini) med seboj postavljene pravokotno, opravijo pri premiku večjo pot in s tem posledično večji korak prijemala. Za avtomatsko zaznavanje meja čistilne površine se uporabijo kontaktni ali brezkontaktni senzorji 22, 23 (tipala ali ustrezni IR ali ultrazvočni senzorji). Na osnovi zaznavanja meja čistilne površine krmilje avtonomno ustavi robota in ga usmeri v drugo smer. Za krmiljenje na daljavo se uporabi brezžična komunikacija (WiFi, IrDA, Bluetooth,…), ki je del elektronike 16.
Bistveni sestavni del je čistilna ščetka 39. Sestavljena je iz finih ščetin, ki so elektrostatično naelektrene in posledično privlačijo prah in nečistoče. Čistilno ščetko poganja elektromotor 40, ki hkrati opravi funkcijo vpetja gredi na eni strani. Na drugi strani je gred čistilne ščetke vpeta v ležaj 41. Umazanija se nalaga v zbiralnik prahu in nečistoč 38. Celoten čistilni sistem 21 je s čistilcem povezan z nosilcem čistilnega sistema 12 (slika 8). Na nosilec čistilnega sistema 12 je čistilni sistem 21 pritrjen z enostavno razstavljivo zvezo. Iz tega razloga je čistilni sistem enostavno montažno snemljiv in zamenljiv, kar mu še poveča enostavnost in funkcionalnost.
Slika 8: Sestava bionskega čistilca foto-napetostnih in solarnih panelov iz gornje strani
Na sliki 10 imamo prikazan prerez čistilnega sistema 21. Prikazana je smer vrtenja 42 gredi čistilne ščetke 39. Ob vrtenju v smeri rotacije 42 se ščetine očistijo skozi česalo 43, ki je pritrjeno na rob zbiralnika prahu in nečistoč 38. Čistilni sistem 21 je prikazan na sliki 9.
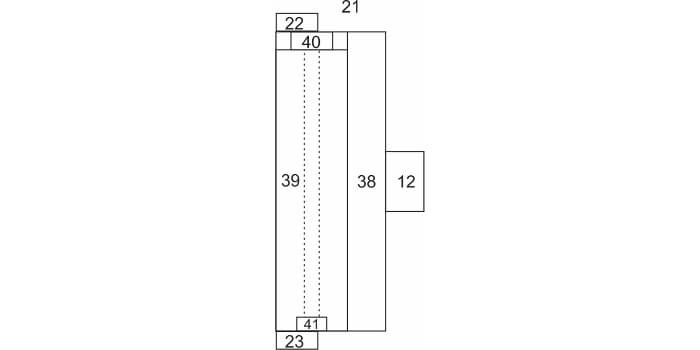
Slika 9: Skica čistilnega sistema
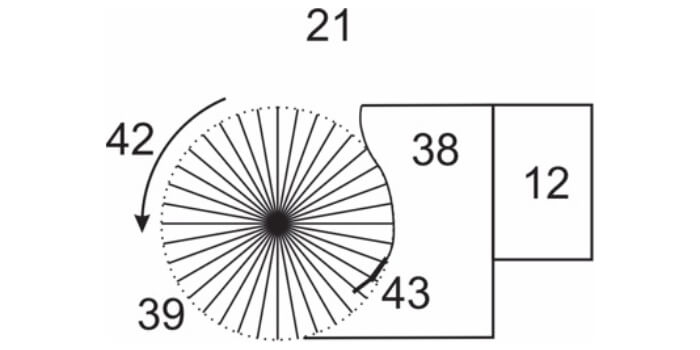
Slika 10: Prerez čistilnega sistema
Izvleček
Bionski čistilec foto-napetostnih in solarnih panelov je sestavljen iz nosilnega ohišja, oprijemal, nosilca oprijemal, distančnika nosilca oprijemal, pomičnega mehanizma, servo elektromotorja, akumulatorja in elektronike. Na vrhu je lahko nameščen lastni fotovoltaični panel, ki nam služi za delno samooskrbo. Pomični mehanizem nam preko sistema vodil mehansko povezuje pogonski servo elektromotor z nosilci oprijemal. Na sprednji strani se nahaja nosilec čistilnega sistema in na njega nameščen čistilni sistem.
Za pomik bionskega čistilca panelov se uporabi vakuumski sistem oprijema, ki je ponazorjen z oprijemom kuščarja, podvrste gekon.
Pomik čistilca se izvede tako, da servo elektromotor premakne pomični mehanizem. Najprej se pritrdita priseska (3) in (6), medtem ko servo elektromotor (14) s pomičnim mehanizmom (13) poskrbi za premik priseskov (4) in (5). V skrajnem položaju se aktivnost priseskov zamenja in servo elektromotor (17) premakne mehanski sistem v drugo skrajno lego. To se dogaja izmenjaje in tako se čistilec pomika.

